
A new soft robot that gets its inspiration from the biomechanics of cheetahs moves more quickly on solid surfaces and through water than earlier versions, according to a new study.
The soft robots can also of grab objects delicately—or with sufficient strength to lift heavy objects.
“Cheetahs are the fastest creatures on land, and they derive their speed and power from the flexing of their spines,” says Jie Yin, an assistant professor of mechanical and aerospace engineering at North Carolina State University and corresponding author of the paper in Science Advances.
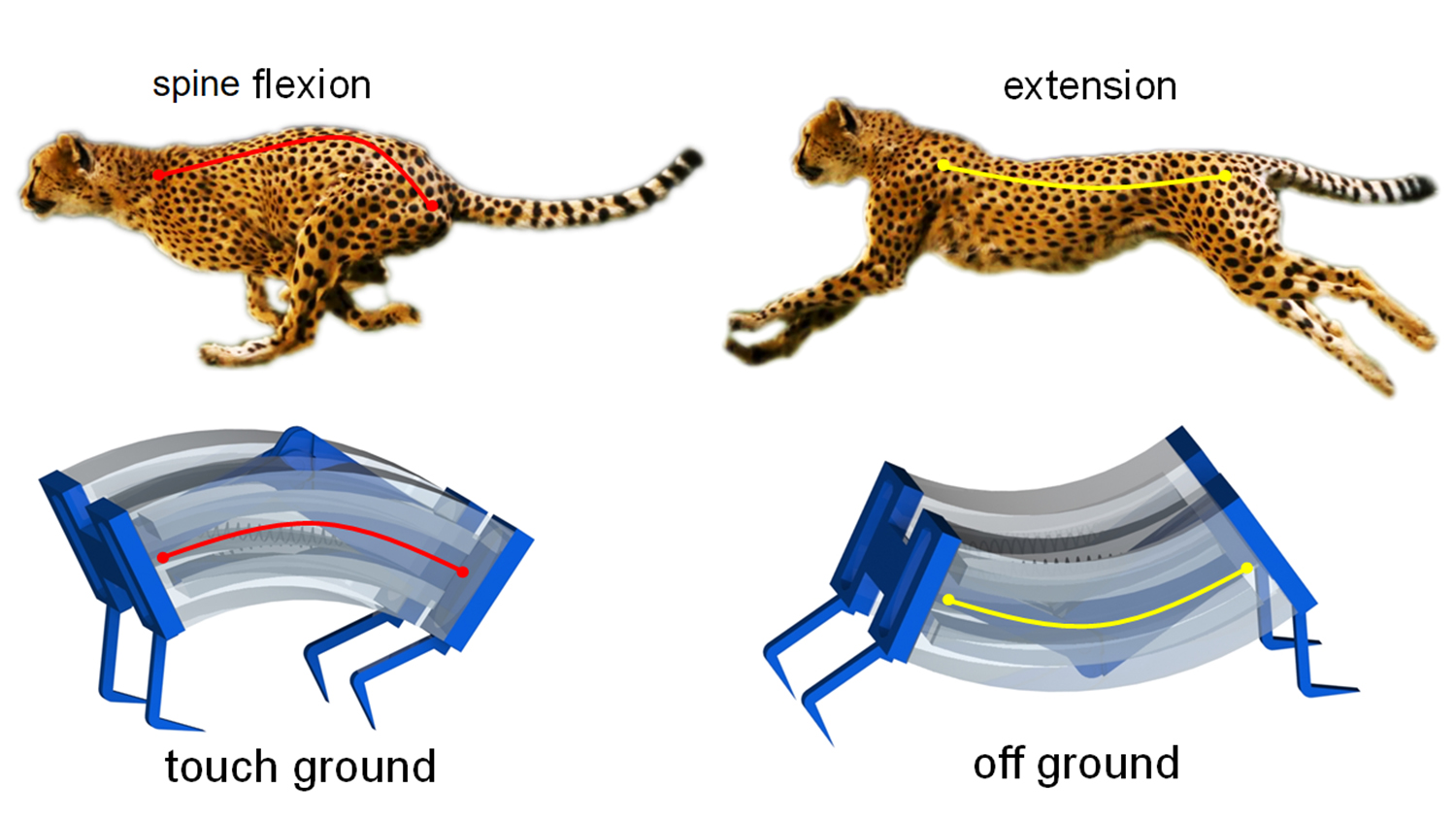
“We were inspired by the cheetah to create a type of soft robot that has a spring-powered, ‘bistable’ spine, meaning that the robot has two stable states,” Yin says. “We can switch between these stable states rapidly by pumping air into channels that line the soft, silicone robot.
“Switching between the two states releases a significant amount of energy, allowing the robot to quickly exert force against the ground. This enables the robot to gallop across the surface, meaning that its feet leave the ground. Previous soft robots were crawlers, remaining in contact with the ground at all times. This limits their speed.”
The fastest soft robots until now could move at speeds of up to 0.8 body lengths per second on flat, solid surfaces. The new class of soft robots, which are called “Leveraging Elastic instabilities for Amplified Performance” (LEAP), are able to reach speeds of up to 2.7 body lengths per second—more than three times faster—at a low actuation frequency of about 3Hz.
The new robots can also run up steep inclines, challenging or impossible for soft robots that exert less force against the ground. The “galloping” LEAP robots are approximately 7 centimeters (about 2.75 inches) long and weigh about 45 grams (about 0.09 lbs).
The researchers also demonstrated that the LEAP design could improve swimming speeds for soft robots. When they replaced feet with fins, the LEAP robot could swim at a speed of 0.78 body lengths per second, as compared to 0.7 body lengths per second for the previous fastest swimming soft robot.
“We also demonstrated the use of several soft robots working together, like pincers, to grab objects,” Yin says. “By tuning the force exerted by the robots, we were able to lift objects as delicate as an egg, as well as objects weighing 10 kilograms [22 lbs] or more.”
The researchers note that this work serves as a proof of concept and are optimistic that they can modify the design to make the LEAP robots even faster and more powerful.
“Potential applications include search and rescue technologies, where speed is essential, and industrial manufacturing robotics,” Yin says. “For example, imagine production line robotics that are faster, but still capable of handling fragile objects.
We’re open to collaborating with the private sector to fine-tune ways they can incorporate this technology into their operations.”
Additional coauthors are from Temple University, Colorado State University, the City University of New York, and NC State. The National Science Foundation supported the work.
Source: NC State
The post Cheetah-inspired soft robot ‘gallops’ with super-speed appeared first on Futurity.
from Futurity https://ift.tt/3fDxWyv
No comments:
Post a Comment